





Sbloccare la mappatura aerea e la raccolta dati: Elevare le operazioni con la potenza e la precisione della tecnologia LiDAR di DJI.

Introduzione e principi della tecnologia LiDAR
Che cos’è il LiDAR?
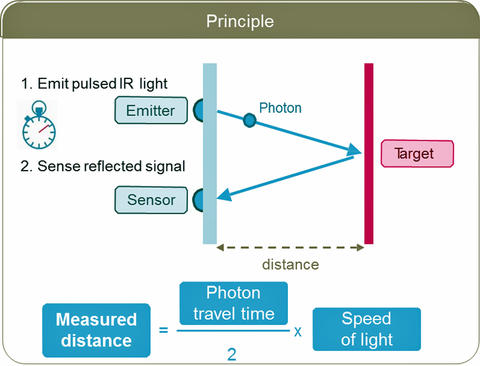
LiDAR, acronimo di Light Detection and Ranging, è una tecnologia di telerilevamento che utilizza rapidi impulsi laser per mappare la superficie dell’obiettivo. Inviando un raggio laser e misurando il tempo che la luce impiega a riflettersi sugli oggetti, il LiDAR crea mappe tridimensionali dettagliate dei punti.
Immaginate di trovarvi in una stanza completamente buia con una torcia elettrica. Se puntate la torcia su vari oggetti, la luce rimbalzerà e, vedendola, potrete farvi un’idea della posizione e della distanza degli oggetti. Più volte si punta la luce e da diverse angolazioni, migliore sarà l’idea della disposizione della stanza. Il LiDAR funziona in modo simile, ma invece di utilizzare la luce visibile come una torcia elettrica, utilizza una luce laser invisibile. Ecco come funziona:
- Emissione: Il dispositivo LiDAR invia un rapido impulso di luce laser verso un oggetto.
- Riflessione: La luce si riflette sull’oggetto e ritorna al sensore LiDAR.
- Rilevamento: Il dispositivo misura il tempo di ritorno della luce. Poiché la velocità della luce è costante, questo tempo di durata può essere utilizzato per calcolare la distanza tra il sensore LiDAR e l’oggetto target.
LiDAR vs. Fotogrammetria
Il sistema LiDAR misura i dati, mentre il sistema di fotogrammetria li calcola. Questa differenza fondamentale li rende più adatti a diverse applicazioni. Il LiDAR utilizza impulsi laser per misurare la realtà, il che lo rende ideale per le applicazioni che richiedono una certezza assoluta dei dati. Il LiDAR può penetrare attraverso la vegetazione e non è influenzato dalle condizioni di illuminazione, il che lo rende un’ottima opzione per la mappatura di foreste o altre aree con una fitta copertura vegetale. Il LiDAR è utile anche per creare modelli del terreno e mappe topografiche accurate.
La fotogrammetria utilizza telecamere per catturare immagini sovrapposte di un’area, che vengono poi unite per creare un modello 3D o una mappa ortografica. È meno costosa del LiDAR e può essere utilizzata con hardware già pronto, come droni e telecamere. Ciò lo rende utile per creare modelli altamente dettagliati di edifici e infrastrutture, nonché ortofoto ad alta risoluzione per applicazioni di ispezione e monitoraggio.
| Aspetto | Fotogrammetria | LiDAR |
|---|---|---|
| Definizione | Una tecnica per ottenere misure e modelli 3D da fotografie. | Un metodo di telerilevamento che utilizza la luce laser per misurare le distanze e generare modelli 3D precisi della superficie terrestre. |
| Precisione | Elevata precisione in condizioni di buona illuminazione e chiarezza dopo l’applicazione di GCP in RTK. | La precisione si basa sullo stato iniziale del POS e non dipende dalle condizioni di illuminazione. |
| Costo | Costo generalmente inferiore, più accessibile per progetti su piccola scala. | Costi più elevati a causa delle attrezzature sofisticate e dei requisiti di lavorazione. |
| Manipolazione del terreno | Costo generalmente inferiore, più accessibile per progetti su piccola scala. | Eccellente in vari terreni, tra cui la vegetazione fitta e i paesaggi urbani. |
| Elaborazione dati | Elaborazione lunga, soprattutto per i grandi insiemi di dati. | L’elaborazione è più rapida perché i dati vengono acquisiti in formato di coordinate spaziali in modo nativo. |
| Condizioni di luce | Richiede una buona illuminazione per ottenere risultati ottimali. | Efficace in qualsiasi condizione di luce, anche di notte. |
| Vegetation Penetration | Lotta con la vegetazione fitta. | In grado di penetrare la fitta vegetazione per raggiungere il suolo. |
| Dipendenza dal tempo | Le prestazioni possono essere influenzate da condizioni atmosferiche come nuvole e pioggia. | Meno influenzato dalle condizioni atmosferiche. |
| Risoluzione spaziale | Alta risoluzione spaziale per i dettagli della superficie. | Risoluzione spaziale inferiore rispetto alla fotogrammetria. |
| Applicazione | Ideale per la documentazione del patrimonio culturale, la cartografia su piccola scala e l’architettura. | Ideale per la mappatura topografica su larga scala, la silvicoltura e la pianificazione urbana. |
Quali sono i componenti di un sistema LiDAR aviotrasportato integrato?
Componenti hardware
Sistema LiDAR
- Modulo LiDAR: Il modulo laser, il componente più importante del sistema LiDAR, genera un fascio laser pulsato che viene diretto sulla superficie del bersaglio. Il modulo laser è costituito da più componenti, tra cui la sorgente di luce laser, il ricevitore, i componenti ottici e il controllore elettronico.
- Sorgente di luce laser: Genera brevi impulsi di luce laser che vengono utilizzati per misurare la distanza tra il sensore LiDAR e gli oggetti nell’ambiente.
- Ricevitore: Rileva la luce laser riflessa e la converte in un segnale elettronico che può essere elaborato dal sistema LiDAR.
- Componenti ottici: Questi componenti sono responsabili della direzione e della messa a fuoco del raggio laser verso la superficie di destinazione e della raccolta della luce riflessa.
- Controllore elettronico: controlla la tempistica e la durata degli impulsi laser ed elabora i segnali provenienti dal ricevitore.
- Il ricevitore GNSS (Global Navigation Satellite System) viene utilizzato per fornire una georeferenziazione accurata dei risultati LiDAR scansionati. La maggior parte dei sistemi UAV LiDAR utilizza un proprio sistema GNSS per la registrazione dei dati satellitari per la georeferenziazione e la post-elaborazione oppure è integrata con il DJI PSDK e utilizza il sistema GNSS del drone.
- L’IMU (Inertial Measurement Unit) è un dispositivo che misura l’accelerazione e la velocità angolare di un sistema LiDAR. Integrando queste misure nel tempo, l’IMU può determinare la posizione, la velocità e l’assetto del sistema LiDAR nello spazio tridimensionale. Queste informazioni vengono utilizzate per correggere eventuali movimenti o vibrazioni del sistema LiDAR durante il processo di raccolta dei dati.
- L’INS (Inertial Navigation System) utilizza i dati grezzi di un’IMU e li integra per fornire informazioni su posizione, velocità e orientamento di un oggetto rispetto a un punto di partenza, orientamento e velocità noti. L’INS prende i dati IMU e li integra con le informazioni di posizionamento GNSS per fornire una stima continua della posizione e dell’orientamento del sensore LiDAR durante l’acquisizione dei dati.
Sistema UAV
- L’UAV o veicolo aereo senza equipaggio viene utilizzato per sorvolare il sistema LiDAR sull’area da rilevare e può essere dotato di un proprio sistema GNSS e RTK/PPK per una georeferenziazione accurata del sistema LiDAR.
Componenti software
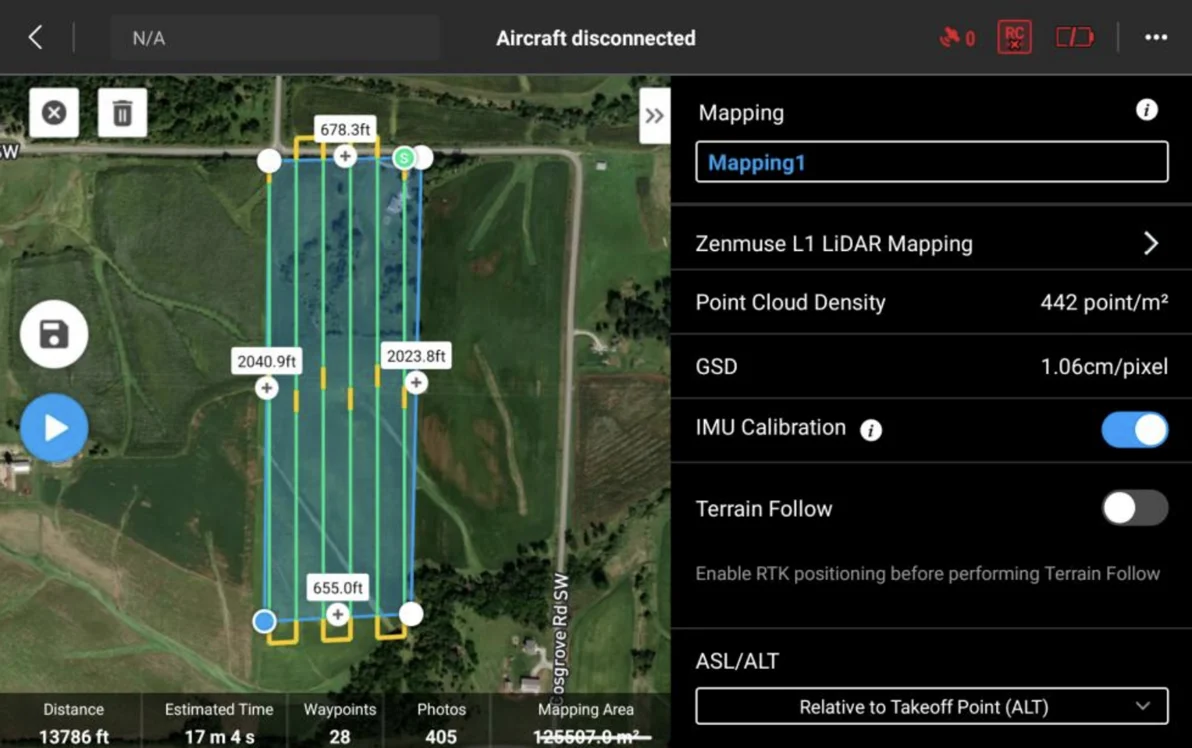
- Il software di pianificazione della missione di volo viene utilizzato per pianificare la traiettoria di volo di un drone equipaggiato con un sistema LiDAR. Questo software consente all’utente di definire un’area da rilevare e genera automaticamente una rotta di volo basata su waypoint. L’utente può regolare i parametri del sistema UAV e le azioni del sensore per il volo autonomo a waypoint. Il software genera quindi una rotta di volo che copre in modo efficiente l’area e raccoglie i dati necessari per il sistema LiDAR. Questi dati possono essere utilizzati per creare mappe o modelli 3D dettagliati dell’area rilevata.
- Il software di monitoraggio e controllo del volo consente all’utente di monitorare la traiettoria di volo e lo stato dell’UAV e del sistema LiDAR in tempo reale durante la raccolta dei dati. Il software può visualizzare vari parametri come l’altitudine, la velocità e il livello della batteria. Queste informazioni sono fondamentali per garantire la sicurezza dell’UAV e la raccolta di dati LiDAR di alta qualità. Inoltre, il software di monitoraggio del volo può avvisare l’utente in caso di problemi o malfunzionamenti durante il volo.
- Il software di elaborazione della nuvola di punti grezzi è un software OEM sviluppato dai produttori di sensori. Viene utilizzato per elaborare i dati LiDAR grezzi raccolti da tutti i componenti del sistema e per produrre i dati LiDAR in un formato manipolabile come LAS/LAZ per un uso successivo.
- Il software di elaborazione delle nuvole di punti si riferisce a programmi informatici progettati per manipolare e analizzare i dati delle nuvole di punti. A seconda dell’applicazione, il software di elaborazione delle nuvole di punti può essere utilizzato per varie attività, come la creazione di disegni, l’esecuzione di misure, l’estrazione di superfici, la classificazione e altro ancora.

Terminologie e conoscenze chiave
Riflettività della superficie dell’oggetto
- Le superfici di oggetti diversi hanno tassi di riflettività variabili.
- La maggior parte delle superfici degli oggetti ha una riflettività superiore al 10%.
- L’acqua è un forte assorbitore e un tipico laser LiDAR con una lunghezza d’onda di 905 nm verrà assorbito direttamente. A meno che il LiDAR non sia di tipo batimetrico e la lunghezza d’onda del laser sia più corta, non riuscirà a penetrare l’acqua.
Ecco alcuni esempi di tassi di riflettività superficiale:
- Asfalto fresco: 4-7%
- Erba secca: 15-20%
- Chioma della foresta: 5-20%
- Calcestruzzo bagnato: 30-50%.
- Neve: 60-90%.
Metodi di scansione LiDAR
Modificando il metodo di rotazione all’interno del sensore LiDAR, il sistema LiDAR può ottenere due diverse modalità di scansione meccanica: scansione ripetitiva e scansione non ripetitiva.
Metodo di scansione ripetitiva
La scansione ripetitiva copre solo il FOV orizzontale (70,4°×4,5°).
Vantaggio: nella mappatura mobile, gli oggetti vengono scansionati solo per un periodo di tempo molto breve, perché la deriva della precisione della navigazione inerziale è molto ridotta in un breve periodo di tempo, quindi il modello scansionato è relativamente più preciso.
Svantaggi: Il FOV verticale è molto piccolo e le informazioni sulla superficie verticale sono quasi inesistenti. Se sono necessarie informazioni sulla superficie verticale, è necessario pianificare almeno due percorsi di volo per compensare la perdita del FOV verticale.
Applicazione: Per scenari con terreni relativamente miti e requisiti di precisione elevati, come la misurazione del terreno, la generazione di DEM/DSM generali.
*Si raccomanda l’uso di scansioni ripetitive nei rilievi per garantire l’accuratezza delle nuvole di punti.
: Per scenari con terreni relativamente poco accidentati e requisiti di precisione elevati, come la misurazione del terreno, la generazione di DEM/DSM generali.
*Si raccomanda di utilizzare la scansione ripetitiva nel rilievo per garantire l’accuratezza della nuvola di punti.
Metodo di scansione non ripetitivo
La scansione non ripetitiva può coprire rapidamente l’intero FOV (70,4°×77,2°).
Vantaggi: Fornisce una copertura completa del FOV, può eseguire una scansione verticale e ottiene buone informazioni verticali da una singola scansione senza impostare un angolo cardanico.
Svantaggi: nella mappatura mobile, gli oggetti vengono scansionati in posizioni e tempi diversi, facendo affidamento sulla precisione della navigazione inerziale. Se l’accuratezza della navigazione inerziale varia nel tempo, l’accuratezza del modello diminuisce. Ciò si traduce in oggetti sfocati o duplicati, nuvole di punti più spesse e fili più spessi. Questo effetto è particolarmente pronunciato nelle scansioni non ripetitive, che hanno un campo visivo più ampio.
Applicazioni: Adatto a scenari con requisiti di precisione relativamente bassi, requisiti di efficienza elevati e requisiti di informazioni altimetriche complete, come la modellazione 3D urbana, la modellazione di strutture tridimensionali complesse, l’ispezione di linee elettriche, la mappatura rapida di emergenza, ecc.
*Nello scenario dell’ispezione delle linee elettriche, se si sceglie il volo a linea singola, si raccomanda di utilizzare il metodo di scansione non ripetitivo.
Lunghezza d’onda
I sistemi LiDAR utilizzano i laser per emettere impulsi di luce; la lunghezza d’onda del laser determina le caratteristiche dell’impulso. La lunghezza d’onda del laser influisce sulla capacità del sistema LiDAR di penetrare nei vari materiali e sui tipi di riflessi che può rilevare. Di seguito sono riportati due tipi di LiDAR comuni e il corrispondente intervallo di lunghezze d’onda
I LiDAR nel vicino infrarosso (NIR) utilizzano in genere laser con lunghezze d’onda comprese tra 800 e 1.000 nanometri. I sistemi LiDAR NIR sono in grado di penetrare meglio la vegetazione e di rilevare più ritorni da un singolo impulso, il che li rende ideali per le applicazioni forestali. Tuttavia, questi sistemi LiDAR non sono in grado di penetrare l’acqua e non sono adatti per le applicazioni batimetriche.
I LiDAR batimetrici utilizzano lunghezze d’onda più corte dello spettro verde e blu per penetrare nell’acqua e misurare la profondità del fondale marino. La luce laser verde, con una lunghezza d’onda di 532 nm, è la più utilizzata per i LiDAR batimetrici, poiché penetra meglio nell’acqua rispetto ad altre lunghezze d’onda. Anche la luce laser blu, con una lunghezza d’onda di 445 nm, viene utilizzata in alcuni sistemi LiDAR batimetrici in quanto garantisce una migliore penetrazione in condizioni di acqua limpida. I sistemi LiDAR batimetrici sono utilizzati per applicazioni quali la mappatura dei fondali marini, la gestione delle zone costiere e l’ispezione delle infrastrutture subacquee.
Raggio di rilevamento
La portata di rilevamento si riferisce alla distanza massima alla quale un sistema LiDAR può rilevare e misurare accuratamente gli oggetti. Diversi fattori influenzano il campo di rilevamento di un sistema LiDAR, tra cui la potenza e la lunghezza d’onda del laser, la sensibilità del ricevitore e la riflettività degli oggetti da scansionare. In genere, le specifiche del campo di rilevamento sono fornite con la riflettività della superficie del bersaglio o le condizioni ambientali come riferimento.
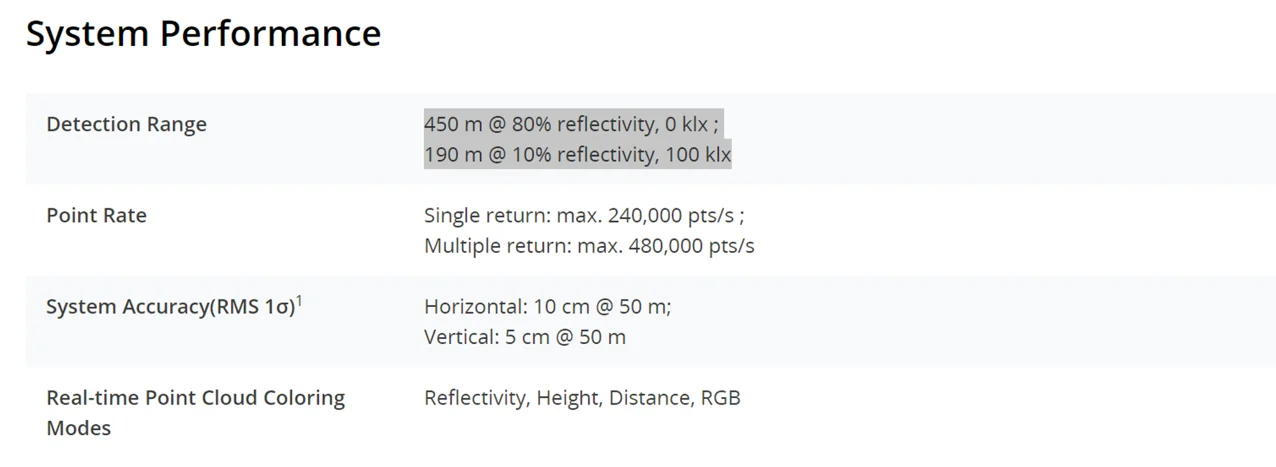
Vale la pena notare che la distanza massima di rilevamento specificata dai produttori di LiDAR è solitamente testata sulla base di una riflettività del 90%, che non è significativa per l’uso pratico. La distanza di rilevamento con una riflettività del 10% ha un significato più pratico, poiché si applica alla maggior parte delle superfici.
Un raggio di rilevamento più lungo è auspicabile per i sistemi LiDAR, in quanto consente una maggiore area di copertura e una raccolta di dati più completa.
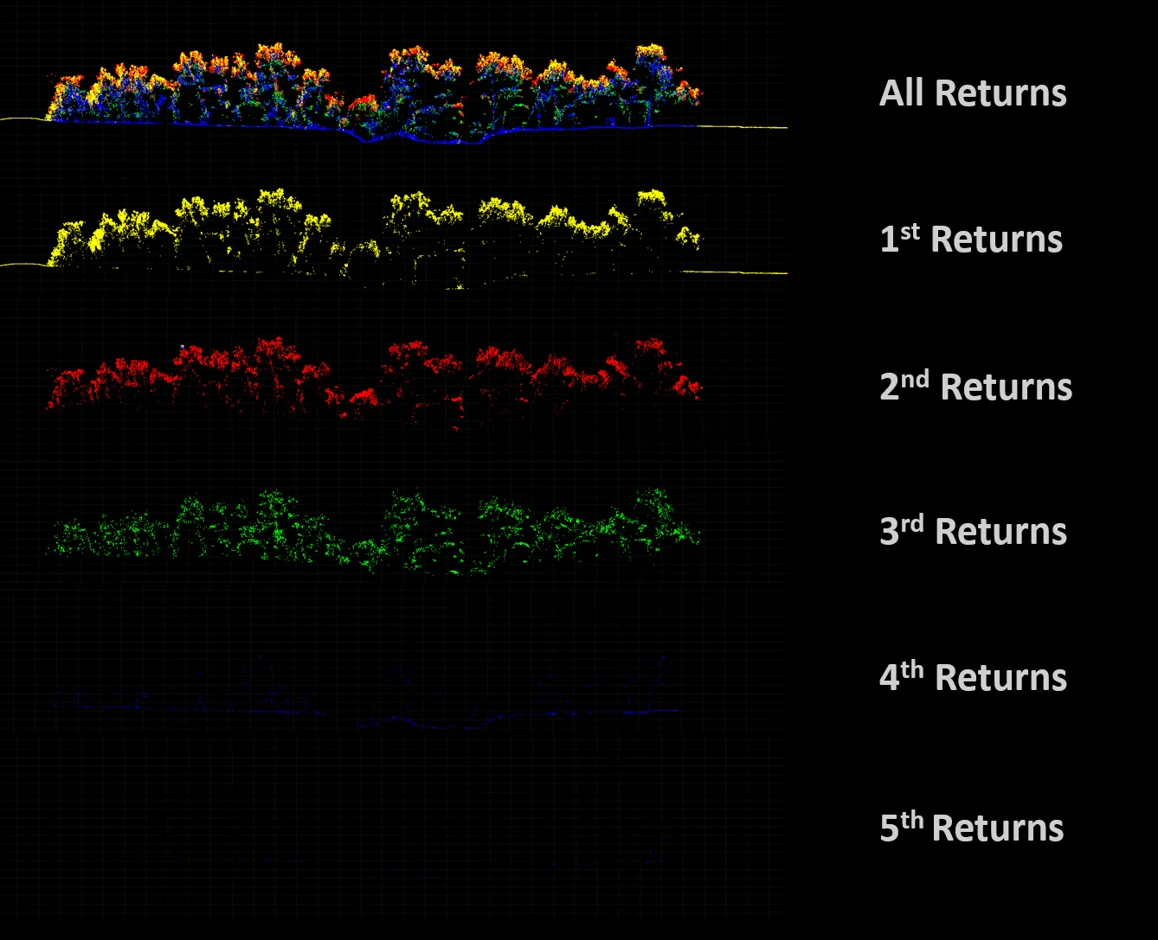
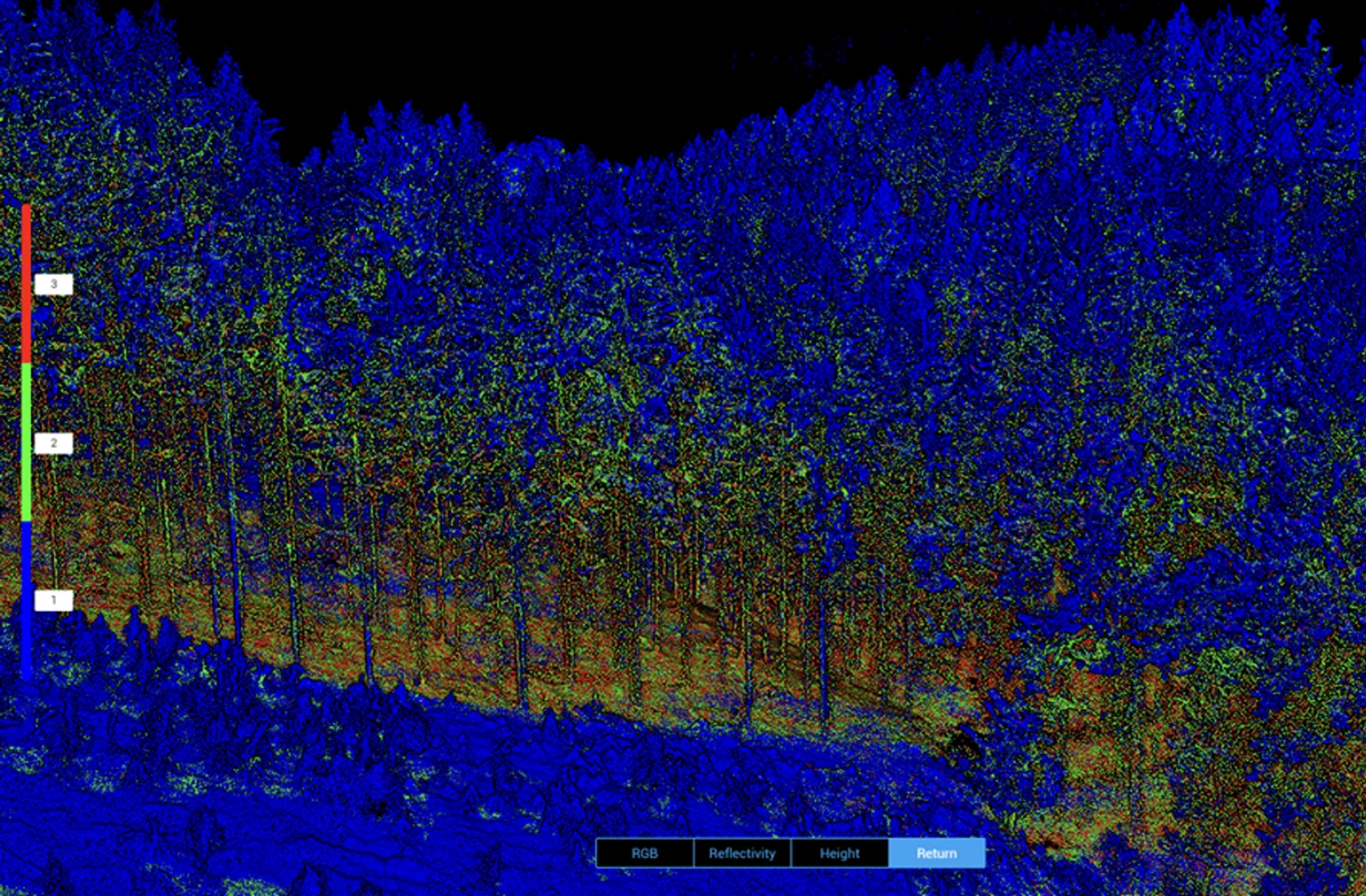
Ritorni multipli
Il laser di un sistema LiDAR invia impulsi. Quando questi impulsi colpiscono gli ostacoli, si riflettono. Poiché la luce non viene bloccata completamente, continua a rimbalzare ogni volta che colpisce qualcosa. In questo modo sembra che il sistema LiDAR possa “vedere attraverso” la vegetazione. In realtà, il LiDAR rileva il terreno e la chioma degli alberi guardando attraverso gli spazi tra le foglie.
- Primo ritorno: È il primo riflesso che il sensore cattura, spesso dall’oggetto più in alto nel percorso dell’impulso laser (come le cime degli alberi o degli edifici).
- Ritorni intermedi: Si tratta di riflessioni provenienti da oggetti situati tra l’oggetto più alto e il suolo (come rami o finestre).
- Ultimo ritorno: Di solito è il riflesso dal suolo o dalla base di un oggetto.
*La pioggia o lo smog nell’aria possono causare interferenze e disturbi nei dati LiDAR. In queste situazioni, si consiglia di utilizzare il “single return” più forte.
Applicazioni correlate
La capacità di rilevare più ritorni consente una comprensione più dettagliata dell’oggetto. Ad esempio:
- Estrazione della vegetazione: Segmentazione di singole piante, conteggio, calcolo della biomassa e analisi dei parametri della vegetazione.
- Mappatura topografica: Estrazione di DEM (Digital Elevation Model) da DSM (Digital Surface Model) per l’analisi del terreno.
- Modellazione delle linee elettriche: Le linee elettriche spesso si sovrappongono e la funzionalità multi-ritorno può misurare più strati di fili in una sola volta, riducendo i dati mancanti a causa di ostruzioni.
Divergenza del fascio
La divergenza del fascio si riferisce alla diffusione o all’allargamento di un fascio laser sulla distanza. La divergenza del fascio rappresenta l’angolo con cui il fascio laser si diffonde mentre viaggia dal sensore LiDAR e si allontana dal punto di origine.
In sostanza, una divergenza del fascio minore significa che il laser rimane più focalizzato su distanze maggiori, mentre una divergenza del fascio maggiore significa che il laser si diffonde maggiormente durante il percorso.
Impatto sulla penetrazione delle chiome
In ambienti come le foreste, una minore divergenza del fascio (fascio più focalizzato) è in genere più efficace nel penetrare la chioma e raggiungere il terreno sottostante. Questo perché un raggio laser più concentrato può trovare più facilmente gli spazi tra le foglie e i rami, migliorando il rilevamento dei punti a terra. D’altro canto, un laser con una divergenza del fascio più elevata potrebbe disperdersi maggiormente sulla chioma e non raggiungere il suolo della foresta con la stessa efficacia.
Impatto sulla densità dei punti e sulla risoluzione
Se da un lato un fascio più focalizzato (divergenza minore) può fornire risultati più accurati e con una risoluzione più elevata, dall’altro un fascio con una divergenza maggiore può coprire un’area più ampia con ogni impulso, portando a una densità di punti e a una risoluzione potenzialmente più basse sul bersaglio.Impatto sulla densità di punti e sulla risoluzione
Impatto sulla portata e sulla distribuzione dell’energia
I laser con una minore divergenza del fascio mantengono la concentrazione di energia su distanze maggiori. Questo aspetto è fondamentale per i sistemi LiDAR che devono operare su lunghe distanze. Con una maggiore divergenza del fascio, l’energia si distribuisce su un’area più ampia, riducendo potenzialmente la potenza del segnale di ritorno, soprattutto a distanze maggiori.
Interazione atmosferica
La divergenza del fascio può anche avere un ruolo nel modo in cui il laser interagisce con le particelle presenti nell’atmosfera, come polvere, nebbia o pioggia. Un fascio laser con una divergenza maggiore potrebbe disperdersi maggiormente a causa dell’interazione con queste particelle, riducendo così la portata effettiva e la precisione del sistema LiDAR in determinate condizioni.
Frequenza di campionamento
La frequenza di campionamento si riferisce al numero di punti raccolti da un sistema LiDAR in un determinato periodo. Si misura in hertz (Hz). Una frequenza di campionamento più elevata significa che viene raccolto un maggior numero di punti al secondo, con il risultato di una nuvola di punti più densa.
Tuttavia, una frequenza di campionamento più elevata significa anche che vengono raccolti più dati, il che può portare a file di dimensioni maggiori e a tempi di post-elaborazione più lunghi. Pertanto, la frequenza di campionamento di un sistema LiDAR deve essere scelta con attenzione in base alle esigenze specifiche di densità del progetto.
È importante notare che la frequenza di campionamento da sola non determina l’accuratezza dei dati LiDAR. Anche altri fattori, come la divergenza del raggio laser e l’accuratezza dell’IMU e del GPS, svolgono un ruolo significativo nel determinare l’accuratezza dei dati.
Calibrazione IMU
La precisione del LiDAR è strettamente legata alla precisione dell’IMU. Quando un drone vola a velocità costante, l’IMU potrebbe perdere la sua precisione. Per questo motivo, la maggior parte dei sistemi LiDAR aviotrasportati richiede la calibrazione dell’IMU prima, durante e dopo il volo. Se l’IMU non è calibrata, i dati possono risultare imprecisi, con ripercussioni sulle analisi successive e sulle applicazioni che si basano sui dati LiDAR.
Esistono due metodi comuni per calibrare l’IMU durante il volo del drone: le calibrazioni “a otto” e “accelerazione-rallentamento”. Entrambi i metodi di calibrazione, manuale e automatico, forniscono gli stessi risultati.
Il sistema LiDAR integrato di DJI utilizza il metodo di calibrazione “accelerazione-rallentamento” e il processo di calibrazione dell’IMU viene integrato automaticamente durante il volo di qualsiasi missione. Quando si vola con il sistema DJI LiDAR manualmente, l’app DJI Pilot ricorda all’utente di ricalibrare l’IMU dopo un certo periodo di tempo di volo.
Fattori che influenzano le prestazioni
L’efficienza e il tasso di penetrazione possono essere influenzati da vari fattori della tecnologia LiDAR. La divergenza del fascio e i ritorni multipli giocano un ruolo nella penetrazione, mentre la calibrazione dell’IMU influisce sulla precisione. L’allineamento delle strisce influisce sulla precisione e i diversi metodi di scansione influiscono sulla copertura e sulla densità della scansione verticale. Anche la velocità di volo e la frequenza di campionamento influiscono sulla densità.
Fattori che influenzano la densità:
- Frequenza di campionamento: Una frequenza di ripetizione degli impulsi (PRF) o una frequenza di campionamento più elevata possono determinare una maggiore densità di punti, supponendo che altri fattori come la velocità di volo e l’altitudine rimangano costanti.
- Altitudine di volo: Volando a un’altitudine inferiore si ottiene di solito una maggiore densità di punti perché gli impulsi laser hanno un’impronta più piccola sul terreno.
- Sovrapposizione: Il rilevamento con linee di volo sovrapposte può aumentare la densità di punti nelle regioni di sovrapposizione.
- Terreno e vegetazione: Caratteristiche come le fitte foreste possono determinare ritorni multipli da un singolo impulso laser, aumentando potenzialmente la densità effettiva in quelle aree.
- Velocità di volo: Una velocità di volo più bassa consente una maggiore densità di punti, poiché il sensore LiDAR ha più tempo per inviare gli impulsi laser e rilevarne i ritorni.
Elaborazione dei dati LiDAR grezzi
Densità della nuvola di punti
La densità descrive il numero di punti LiDAR raccolti per unità di superficie. Spesso viene espressa come punti per metro quadrato (pts/m^2). Ad esempio, una densità di 10 pts/m^2 significa che, in media, ci sono 10 punti di ritorno LiDAR in ogni metro quadrato dell’area rilevata.
I diversi settori verticali hanno requisiti diversi per la densità delle nuvole di punti:
- Rilevamento e cartografia: Per le mappe in scala 1:500, la densità della nuvola di punti richiesta è ≥16 punti/metro quadrato.
- Ispezione di linee elettriche: Per un’analisi dettagliata delle barriere di alberi o per ispezioni approfondite, le linee di trasmissione richiedono generalmente almeno 25 punti/metro quadrato. Alcune specifiche richiedono densità ancora più elevate, in genere da 50 a 250 punti/metro quadrato.
- Rilievo forestale: Per soddisfare le esigenze di segmentazione dei singoli alberi è necessaria una densità di nuvole di punti di almeno 20 punti/metro quadrato.
Verifica dell’accuratezza dell’elevazione LiDAR
La verifica dell’accuratezza dei dati LiDAR mediante punti di controllo dell’elevazione è un metodo comune per garantire che i modelli digitali di elevazione (DEM) o i modelli digitali del terreno (DTM) derivati siano rappresentazioni accurate del terreno.
Principi per l’impostazione dei punti di controllo altimetrici:
I punti di controllo devono essere distribuiti in modo uniforme e posizionati in modo evidente.
Evitare di posizionarli in aree dove le strisce di volo si sovrappongono o dove ci sono improvvisi cambiamenti di quota.
I punti di controllo devono essere situati su superfici esposte e piane.
Il riferimento altimetrico dei punti di controllo deve corrispondere al riferimento altimetrico della nuvola di punti laser.
Linee guida per i punti di controllo altimetrici:
Distribuire i punti di controllo in modo uniforme in punti liberi.
Non collocarli dove si incrociano le traiettorie di volo o dove il livello del terreno cambia rapidamente.
Devono trovarsi su un terreno aperto e pianeggiante.
Assicurarsi che la loro altezza corrisponda a quella utilizzata nei dati LiDAR.
Formato della nuvola di punti LAS
Il formato LAS è stato sviluppato dall’American Society for Photogrammetry and Remote Sensing (ASPRS) per consentire lo scambio di dati LiDAR a nuvola di punti tra diverse aziende e agenzie. Il formato LAS è un formato di file standardizzato per la memorizzazione e lo scambio di dati di nuvole di punti LiDAR, contenente informazioni sulla posizione, l’intensità, la classificazione e altri attributi di ciascun punto. È anche il risultato dei sistemi LiDAR DJI.
Il formato LAS per i dati delle nuvole di punti include informazioni quali le coordinate tridimensionali dei punti, i colori RGB, la riflettanza, l’ora GPS, il numero di ritorni e il ritorno di un punto.
La versione dei file LAS può essere un problema quando si cerca di leggere o scrivere un file. È importante assicurarsi che la versione del file LAS utilizzato sia compatibile con il software di terze parti utilizzato per elaborarlo. Alcuni software di terze parti potrebbero non essere in grado di leggere o scrivere determinate versioni di file LAS. In caso di problemi di compatibilità, potrebbe essere necessario utilizzare una versione diversa del file LAS o trovare un altro software di terze parti che supporti la versione utilizzata. DJI Terra esporta i dati delle nuvole di punti LiDAR nel formato LAS versione 1.2, che è una versione altamente compatibile del file LAS.
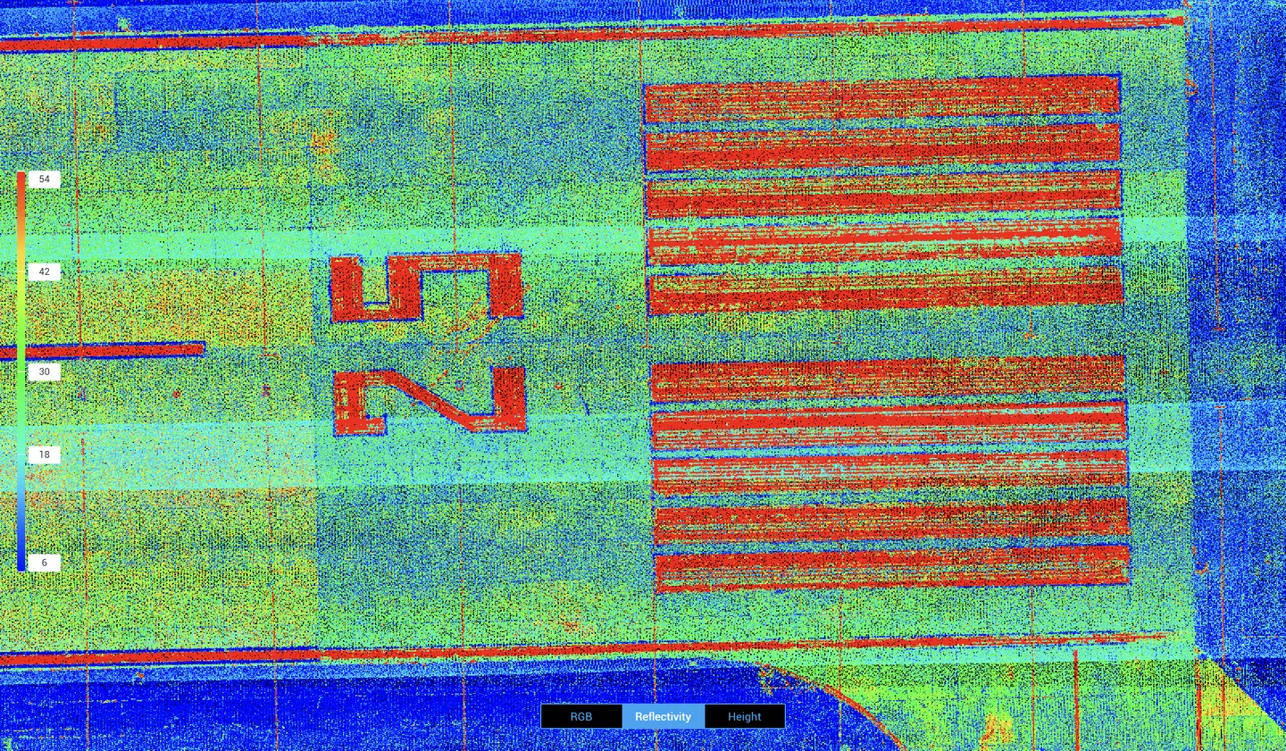
Colorazione delle nuvole di punti
Le nuvole di punti colorate possono fornire un contesto aggiuntivo agli utenti, facilitando l’interpretazione e la comprensione dei dati. Ad esempio, un edificio e un albero possono avere forme strutturali simili sotto certi aspetti, ma il colore può differenziarli immediatamente.
La maggior parte dei sistemi LiDAR aerei è dotata di telecamere RGB che acquisiscono immagini ad alta risoluzione contemporaneamente alla raccolta dei dati LiDAR. Queste immagini possono essere utilizzate per assegnare i valori di colore ai punti LiDAR corrispondenti.
Vantaggi della colorazione:
- Appeal visivo: Le nuvole di punti colorate sono più attraenti e comprensibili di quelle in scala di grigi.
- Analisi migliorata: Il colore può fornire informazioni aggiuntive, come ad esempio aiutare nell’analisi della vegetazione distinguendo tra diversi tipi di piante o nella mappatura urbana per differenziare le varie infrastrutture.
Integrazione con altri set di dati: Una nuvola di punti colorata può essere facilmente integrata con altri set di dati geospaziali, offrendo una visione completa di un’area rilevata. - Processo aggiuntivo di fotogrammetria: Oltre alla colorazione delle nuvole di punti, è possibile utilizzare foto RGB per l’elaborazione fotogrammetrica.
Traiettoria di volo
Per traiettoria si intende il percorso seguito da un UAV dotato di sistema LiDAR durante la raccolta dei dati. La traiettoria è un fattore critico nell’elaborazione dei dati LiDAR perché fornisce i dati di posizione per ogni punto della nuvola di punti. Le informazioni sulla traiettoria sono necessarie per georeferenziare accuratamente i dati LiDAR e produrre modelli 3D precisi dell’area rilevata.
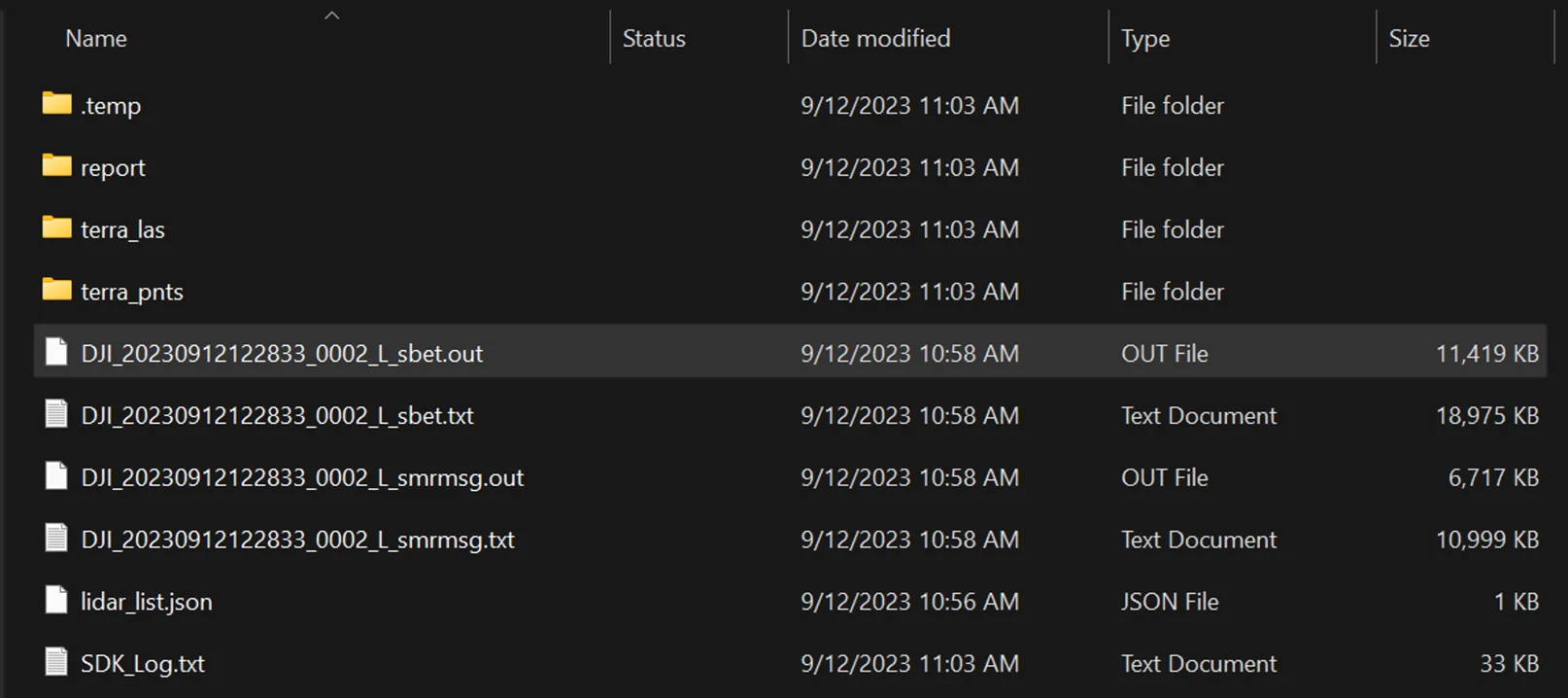
SBET si riferisce alla Smoothed Best Estimate of Trajectory. Si tratta di un formato di file post-elaborato comunemente utilizzato che contiene dati GPS e IMU altamente precisi. Questo formato di file di traiettoria può essere correlato alla nuvola di punti LAS per un’ulteriore post-elaborazione. Il file di traiettoria post-elaborazione della missione LiDAR viene solitamente generato automaticamente insieme al file LAS della nuvola di punti consegnabile. Può essere importato in software di terze parti per la visualizzazione della traiettoria.
Regolazione della striscia
L’aggiustamento della striscia è una procedura per correggere gli errori sistematici e i disallineamenti nei dati LiDAR aviotrasportati, soprattutto se raccolti su più strisce di volo. Quando un terreno viene rilevato con il LiDAR aviotrasportato, l’area viene in genere coperta da più strisce o percorsi di volo sovrapposti. La sovrapposizione è intenzionale per garantire la continuità della copertura e facilitare la correzione degli errori.
Durante l’acquisizione dei dati LiDAR, diversi fattori possono introdurre errori nei dati:
Deriva del sensore: Nel corso del tempo, l’IMU e il GPS possono subire leggere derive nelle loro letture.
Dinamica di volo: La turbolenza, i rapidi cambiamenti di altitudine e le variazioni di orientamento del velivolo possono influenzare i dati acquisiti.
A causa di questi fattori, a volte le strisce di volo adiacenti possono presentare discrepanze verticali o orizzontali. Se non vengono corretti, questi errori possono influire sulle analisi successive e sulle applicazioni che si basano sui dati LiDAR.
Vantaggi della regolazione delle strisce:
- Miglioramento della coerenza dei dati: Riduce i disallineamenti e garantisce la continuità tra strisce di volo adiacenti.
- Derivati di qualità superiore: Migliora la qualità dei prodotti derivati, come i modelli digitali di elevazione (DEM) e i modelli digitali di superficie (DSM).
- Affidabilità: Aumenta la fiducia nell’accuratezza del set di dati LiDAR, rendendolo più affidabile per varie applicazioni, dalla mappatura topografica alla silvicoltura.
Elaborazione dei dati LiDAR grezzi con il software DJI Terra
Il software DJI Terra è l’unico software supportato per elaborare ed esportare i dati grezzi della nuvola di punti LiDAR raccolti da un sistema LiDAR DJI nel formato universale LAS.
Caratteristiche principali dell’elaborazione LiDAR
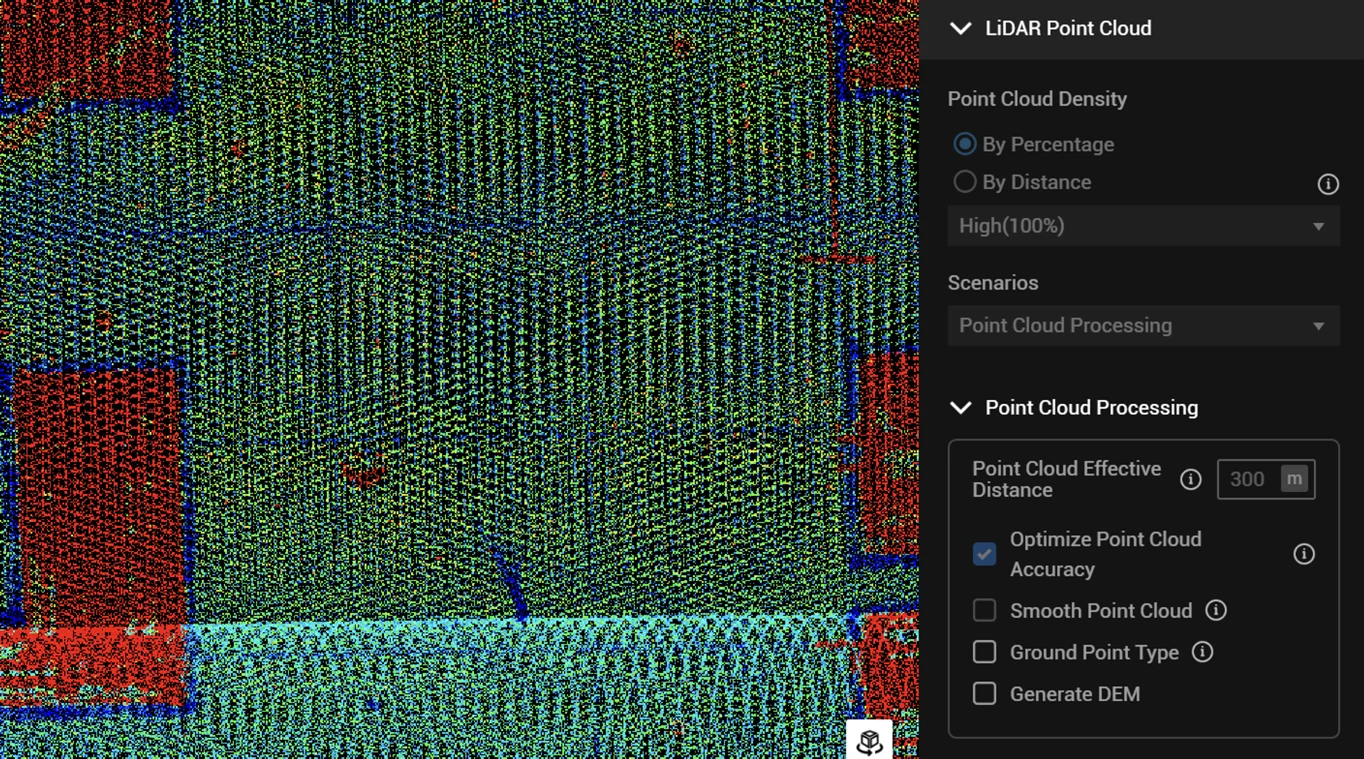
DJI Terra è un software di elaborazione dei dati grezzi LiDAR gratuito che consente la creazione di prodotti LAS a nuvola di punti a partire dai dati grezzi LiDAR. È inoltre ricco di funzioni aggiuntive.
Regolare la densità della nuvola di punti
Si riferisce al numero di punti raccolti per unità di superficie. Questa funzione consente di regolare la densità dei punti per soddisfare le esigenze specifiche del settore.
Ottimizza la precisione della nuvola di punti
Questa funzione utilizza l’algoritmo LPP (Locality Preserving Projections) per ridurre al minimo il comune fenomeno di stratificazione delle nuvole di punti, facendo sì che le nuvole di punti si allineino su uno strato più sottile per migliorare la precisione del modello di nuvola di punti.
Nuvola di punti liscia
Questa funzione affina la nuvola di punti filtrando il rumore e riducendo l’impatto degli errori per creare una rappresentazione visiva più omogenea.
Classificazione dei punti a terra
Serve a distinguere i punti a terra da altri oggetti nella nuvola di punti per generare un modello di elevazione digitale (DEM).
Genera DEM
Questa funzione genera un modello di elevazione digitale (DEM) in formato GeoTiFF dalla nuvola di punti del terreno classificata.
Verifica e spostamento della precisione verticale
Verifica l’accuratezza dei dati LiDAR utilizzando punti di controllo dell’elevazione per garantire che i DEM o i DTM derivati siano rappresentazioni accurate del terreno.
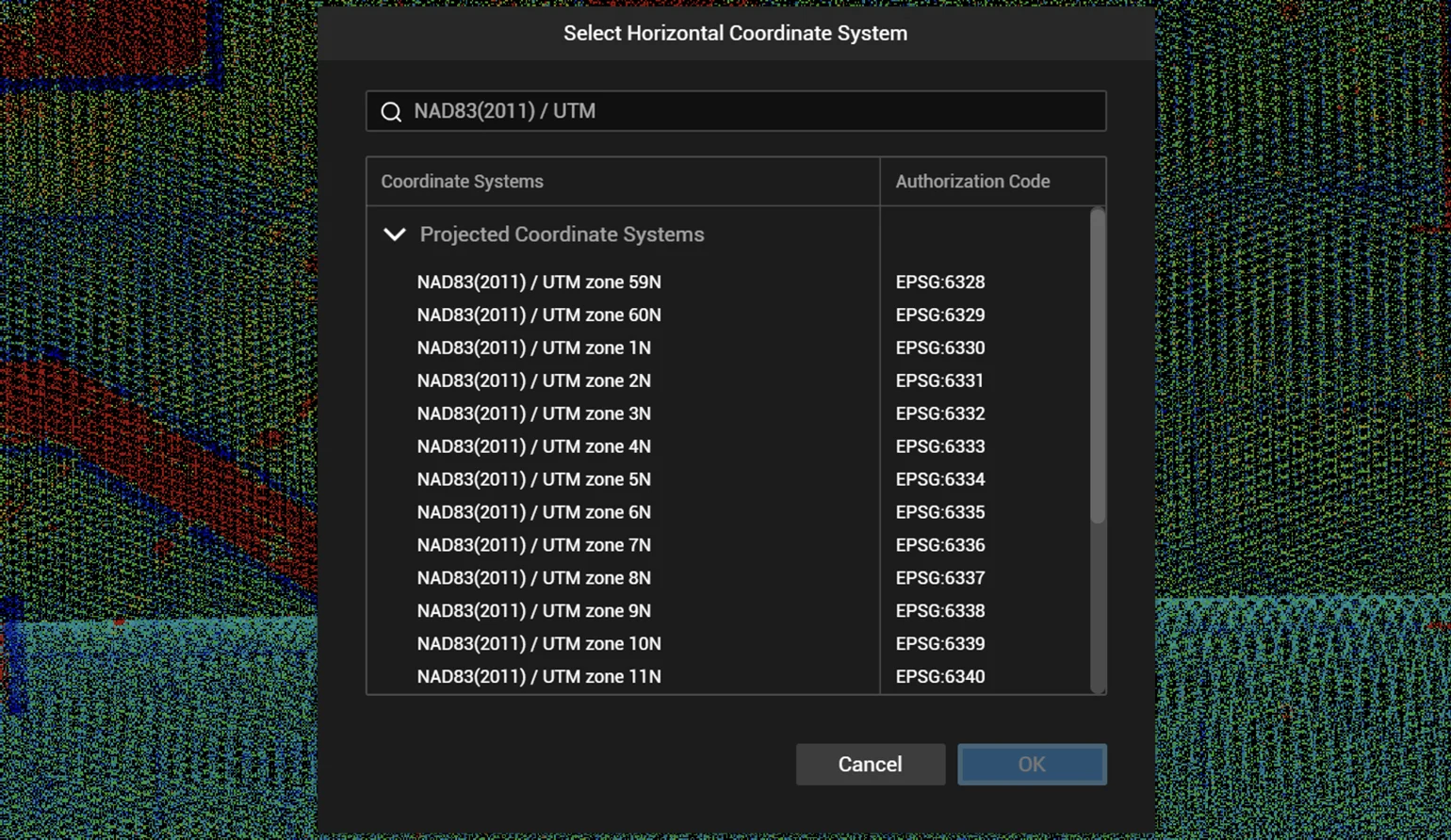
Trasformazione del sistema di coordinate
Consente di trasformare facilmente i sistemi di coordinate locali proiettate o geodetiche per diversi progetti di mappatura e rilievo in tutto il mondo.
Applicazioni LiDAR aviotrasportate
Gestione forestale
Il LiDAR ha un’ampia gamma di applicazioni nella gestione forestale. Può stimare l’altezza degli alberi, misurare la biomassa e mappare la struttura della foresta. Utilizzando il LiDAR, i gestori forestali possono ottenere informazioni dettagliate sulla chioma della foresta, difficili da ottenere con i metodi di rilevamento tradizionali. Uno dei vantaggi principali del LiDAR è la sua capacità di rilevare più ritorni da un singolo impulso laser, consentendo di “vedere attraverso” la vegetazione e di mappare accuratamente la superficie del terreno. Questa capacità rende il LiDAR particolarmente utile per stimare l’elevazione del terreno e identificare i cambiamenti della copertura forestale nel tempo, il che può essere utile per tracciare la deforestazione e gli sforzi di riforestazione. Inoltre, il LiDAR può contribuire allo sviluppo di inventari forestali, fondamentali per una gestione sostenibile delle foreste.
Misurazione volumetrica
La tecnologia LiDAR può fornire misurazioni accurate per i calcoli volumetrici, utili per settori come quello minerario, edile e forestale. Utilizzando i dati delle nuvole di punti LiDAR, è possibile calcolare con precisione il volume di uno stock o la quantità di materiale rimosso da un sito. Queste informazioni possono essere utilizzate per la gestione dell’inventario, il controllo dei costi e la pianificazione delle risorse.
Rilievo topografico
Il LiDAR è uno strumento efficace per i rilievi topografici, in quanto è in grado di tracciare con precisione la forma e le caratteristiche della superficie terrestre. A differenza della fotogrammetria, il LiDAR è in grado di penetrare attraverso la copertura e di acquisire misure accurate della superficie del terreno, anche in aree con una fitta copertura vegetale. Questo perché il LiDAR utilizza impulsi laser per rilevare il terreno e la chioma degli alberi guardando attraverso gli spazi vuoti tra le foglie, ottenendo un migliore rilevamento dei punti a terra.
Ricerca archeologica
Il LiDAR aviotrasportato può essere facilmente utilizzato nella ricerca archeologica per mappare aree estese e difficili da raggiungere e scoprire strutture nascoste in superficie. Il sensore LiDAR può penetrare la vegetazione e acquisire dati ad alta risoluzione, consentendo di identificare strutture che sarebbero difficili o impossibili da vedere da terra. Ciò può aiutare gli archeologi a comprendere meglio la struttura delle città e degli insediamenti antichi e ad avere un’idea delle attività umane del passato.
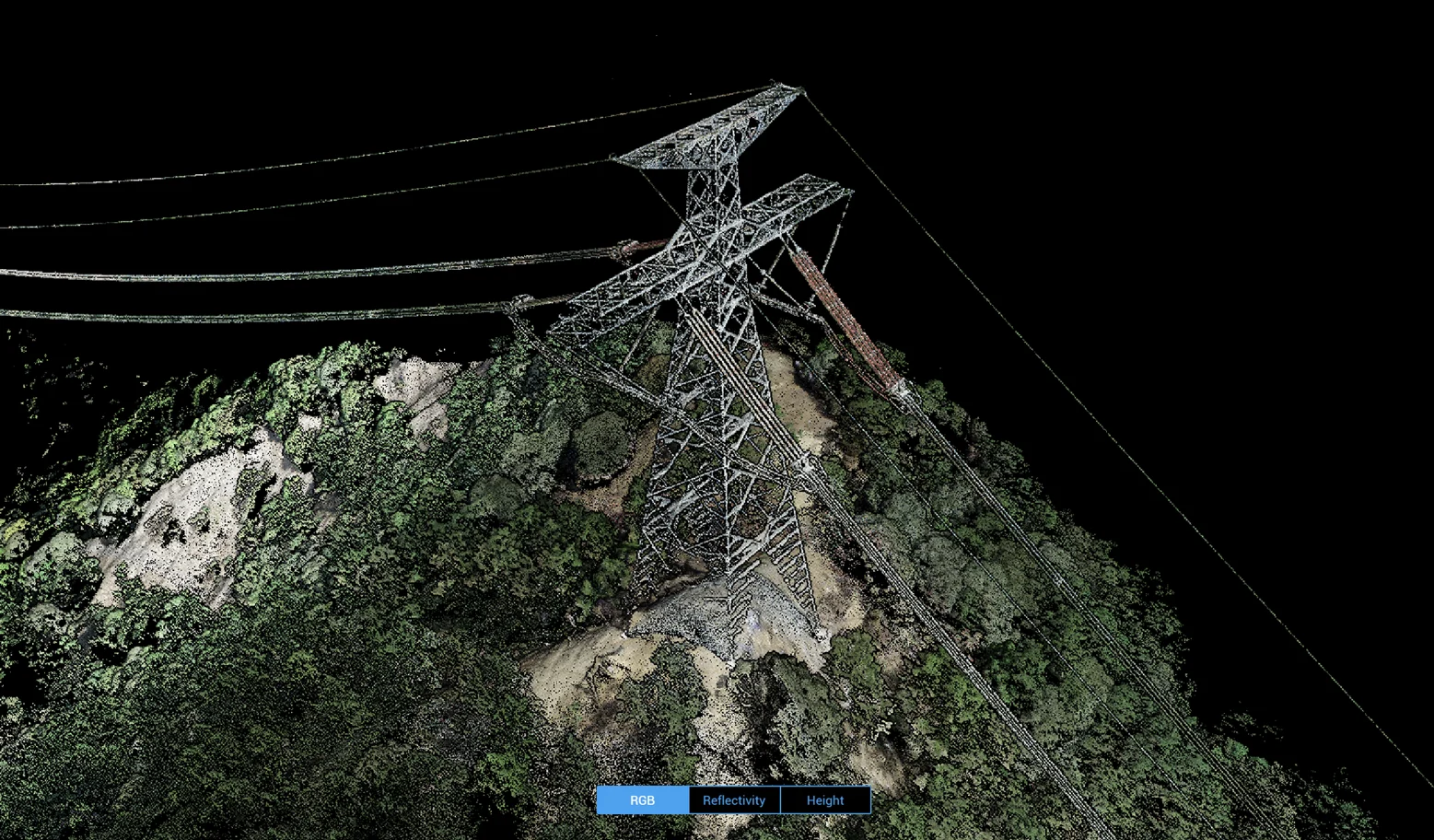
Ispezione di linee elettriche
La tecnologia LiDAR può essere utilizzata per ispezionare le linee elettriche, che possono essere impegnative a causa dell’altezza e della posizione delle linee. Utilizzando i dati delle nuvole di punti LiDAR, è possibile creare una mappa dettagliata delle linee elettriche e dei loro dintorni. Questo può aiutare a identificare potenziali problemi come la crescita della vegetazione o l’abbassamento delle linee, che possono causare interruzioni di corrente o rischi per la sicurezza.
Ispezione delle infrastrutture
Grazie alla capacità del LiDAR di rilevare piccole imperfezioni e crepe, molti utilizzano questa tecnologia per scansionare le strade e le facciate di edifici e ponti. Questo può aiutare ad avvisare i responsabili di progetto di problemi alle strutture che devono essere risolti immediatamente. Per l’acquisizione delle facciate, in particolare, è importante implementare un sistema LiDAR che sia orientato verso la facciata.