





Confronto approfondito tra il nuovo DJI Zenmuse L2 e il suo predecessore, L1. Visualizza set di dati di esempio che mostrano le funzionalità migliorate di L2, inclusa la sua capacità di catturare meglio i dettagli più fini, come le linee elettriche, e di creare DTM più densi.
Il DJI Zenmuse L2 offre maggiore precisione, maggiore efficienza e crea nuvole di punti più robuste rispetto al suo predecessore, L1.
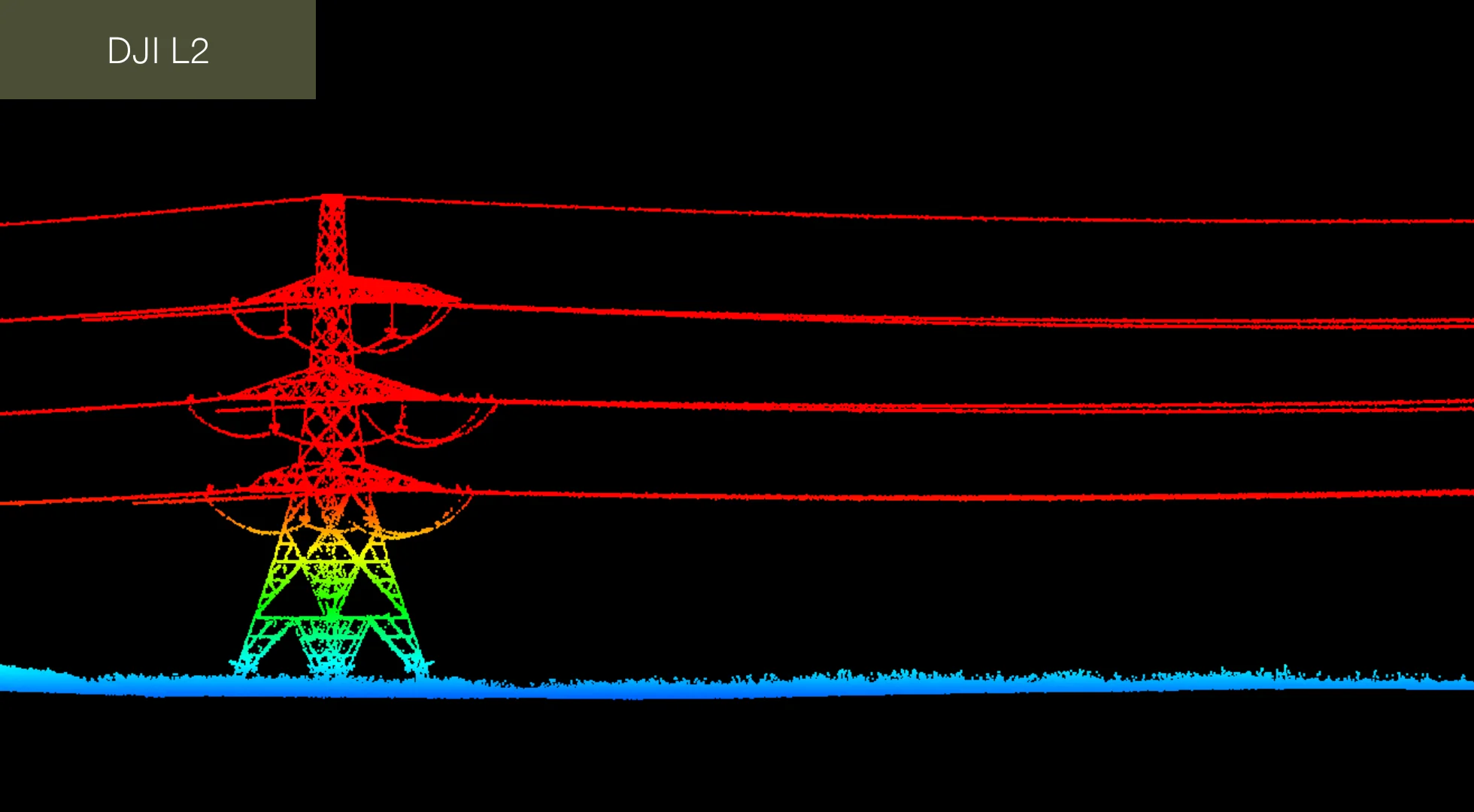
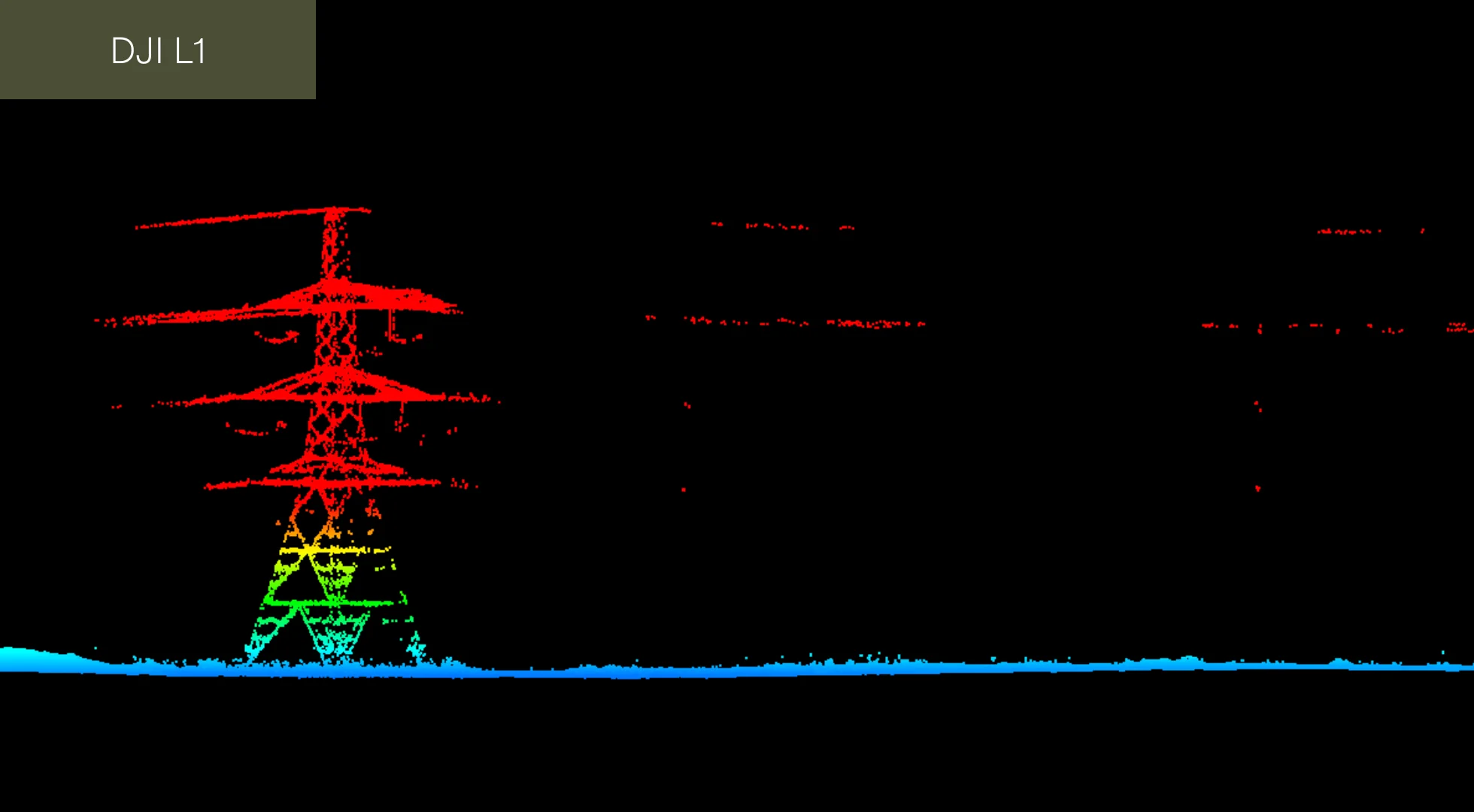
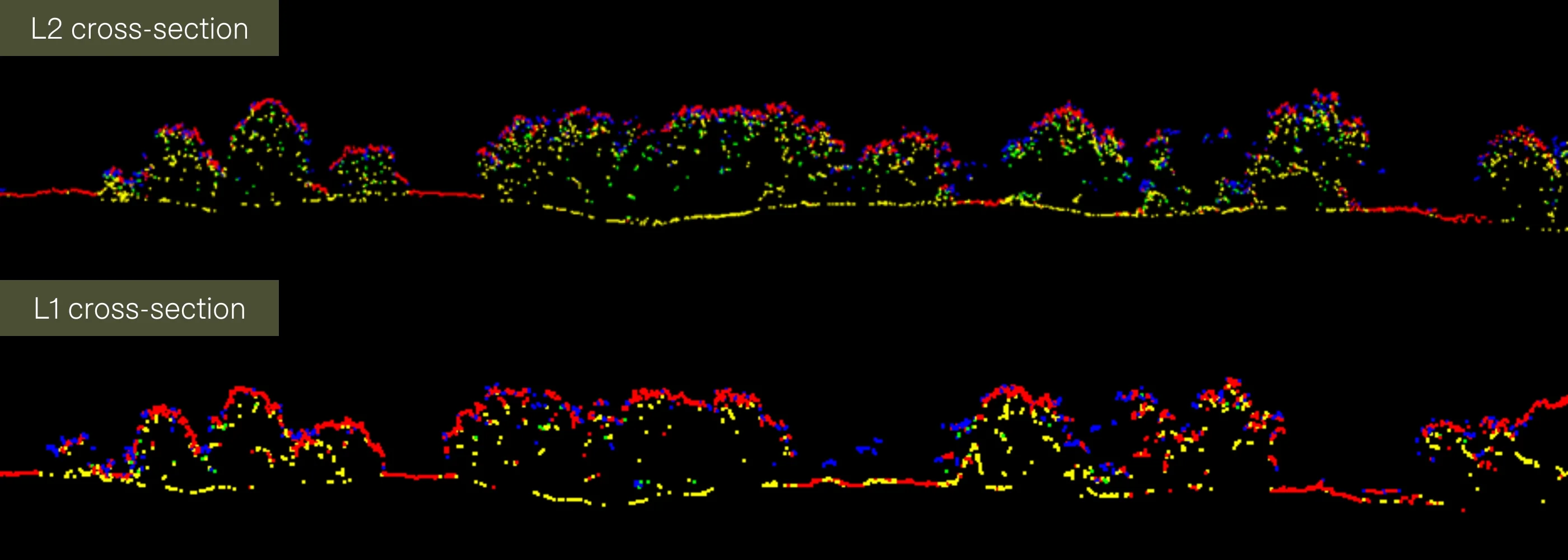
Queste due immagini che mostrano sezioni trasversali identiche di linee elettriche dimostrano le capacità avanzate di L2 di rilevare piccoli elementi su un sito di rilevamento: in questo caso, i cavi elettrici vengono ricreati in modo più dettagliato.
E un rapporto sulla precisione mostra che l’L2 può raggiungere un errore verticale assoluto di 44 mm da un’altitudine di volo di 50 metri, rispetto ai 51 mm dell’L1.
In questo articolo daremo uno sguardo ai principali aggiornamenti di L2 e dimostreremo come possono migliorare i flussi di lavoro di rilevamento rispetto a L1.
L2 vs L1: specifiche chiave in breve
Prima di approfondire i set di dati, diamo un’occhiata alle specifiche di L2 e L1.
| L2 | L1 | |
| Dimensioni | 155 x 128 x 176 mm | 152 x 110 x 169 mm |
| Peso | 905±5 g | 930±10 g |
| Potenza | 28W (tipico) 58W (max) | 30W (tipico) 60W (max) |
| IP Rating | IP54 | IP54 |
| Droni supportati | M300 RTK (richiede DJI RC Plus); M350 RTK | M300 RTK; M350 RTK |
| Portata rilevamento | 450m @ 50% reflectivity, 0klx; 250m @ 10% reflectivity, 100klx | 450m @ 80% reflectivity, 0 klx; 190m @ 10% reflectivity, 100 klx |
| Point Rate | Single return: max. 240,000 pts/s; Multiple returns: max. 1,200,000 pts/s | Single return: max. 240,000 pts/s; Multiple return: max. 480,000 pts/s |
| Precisione sistema (Specifiche di DJI) | Orizzontale: 5 cm @ 150 m; Verticale: 4 cm @ 150 m. Entrambi a 150m altezza di volo, velocità di volo 15m/s | Orizzontale: 10 cm @ 50 m; Verticale: 5 cm @ 50 m. Entrambi a 50m altezza di volo, velocità di volo 10m/s |
| Real-time Point Cloud Colouring Modes | Reflectivity, Height, Distance, RGB | Reflectivity, Height, Distance, RGB |
| LiDAR: Maximum Returns Supported | 5 | 3 |
| LIDAR: Maximum Sampling Frequency | 240kHz for all modes, including Penta | 240 kHz (single/dual echo mode); 160 kHz (triple-echo mode) |
| LiDAR: Modalità scansioni | Non-repetitive scanning pattern, Repetitive scanning pattern | Non-repetitive scanning pattern: Repetitive scanning pattern |
| RGB Mapping Camera: Dimensione sensore & Pixels effettivi | 4/3 inch; 20MP | 1 inch; 20MP |
| RGB Mapping Camera: Velocità otturatore | Mechanical Shutter: 2-1/2000 s; Electronic Shutter: 2-1/8000 s | Mechanical Shutter Speed: 1/2000 – 8 s; Electronic Shutter Speed: 1/8000 – 8 s |
| RGB Mapping Camera: Risoluzione video | 4K @ 30fps | 4K @ 30fps |
| Velocità raccomandata cattura video | 15m/s | 8m/s to 12m/s |
| Pre-flight High-accuracy IMU Warm-up Required | No | Yes |
Come mostra la tabella, L1 e L2 sono dotati di un modulo LiDAR, un sensore RGB per la fotogrammetria e la colorazione delle nuvole di punti e un’IMU ad alta precisione.
Ma l’L2, presentato da DJI il 10 ottobre 2023, presenta alcuni miglioramenti chiave rispetto all’L1 (rilasciato nel 2020), come:
- Aumento del tasso di rendimento
- Frequenza di campionamento più elevata
- Punti laser più piccoli e più concentrati per nuvole di punti più dense
- Sensore di mappatura RGB più grande
- Migliore tasso di rilevamento: può rilevare oggetti con una riflettività del 50%, mentre L1 richiede che gli oggetti abbiano almeno l’80% di riflettività – da 450 m.
- Non richiede un periodo di 5-10 minuti per il riscaldamento dell’IMU.
Sito di prova uno: viadotto della Colne Valley sulla fase uno dell’HS2
La JV Align (Bouygues Travaux Publics, Sir Robert McAlpine e VolkeFitzpatrick) sta consegnando la sezione Central 1 (C1) della Fase Uno HS2, compreso un viadotto di 3,4 km attraverso la Colne Valley.
In collaborazione con Murphy Geospatial, un subappaltatore della Align JV, per far volare la L2 e la L1 nel sito dell’argine sud del viadotto.
Murphy dice che utilizzerebbe L2 per:
- Vegetazione ad alta densità e dove sono necessari livelli del terreno accurati.
- Ambienti edilizi/urbani in cui sono presenti caratteristiche molto fini/piccole che necessitano di essere registrate.
- Rilievo quantitativo, soprattutto laddove il materiale o il terreno presentano elevate proprietà/caratteristiche riflettenti.
In quanto tale, era un luogo di prova ottimale, contenente vegetazione, linee elettriche e scorte. Ha fornito un buon banco di prova per un sensore LiDAR.

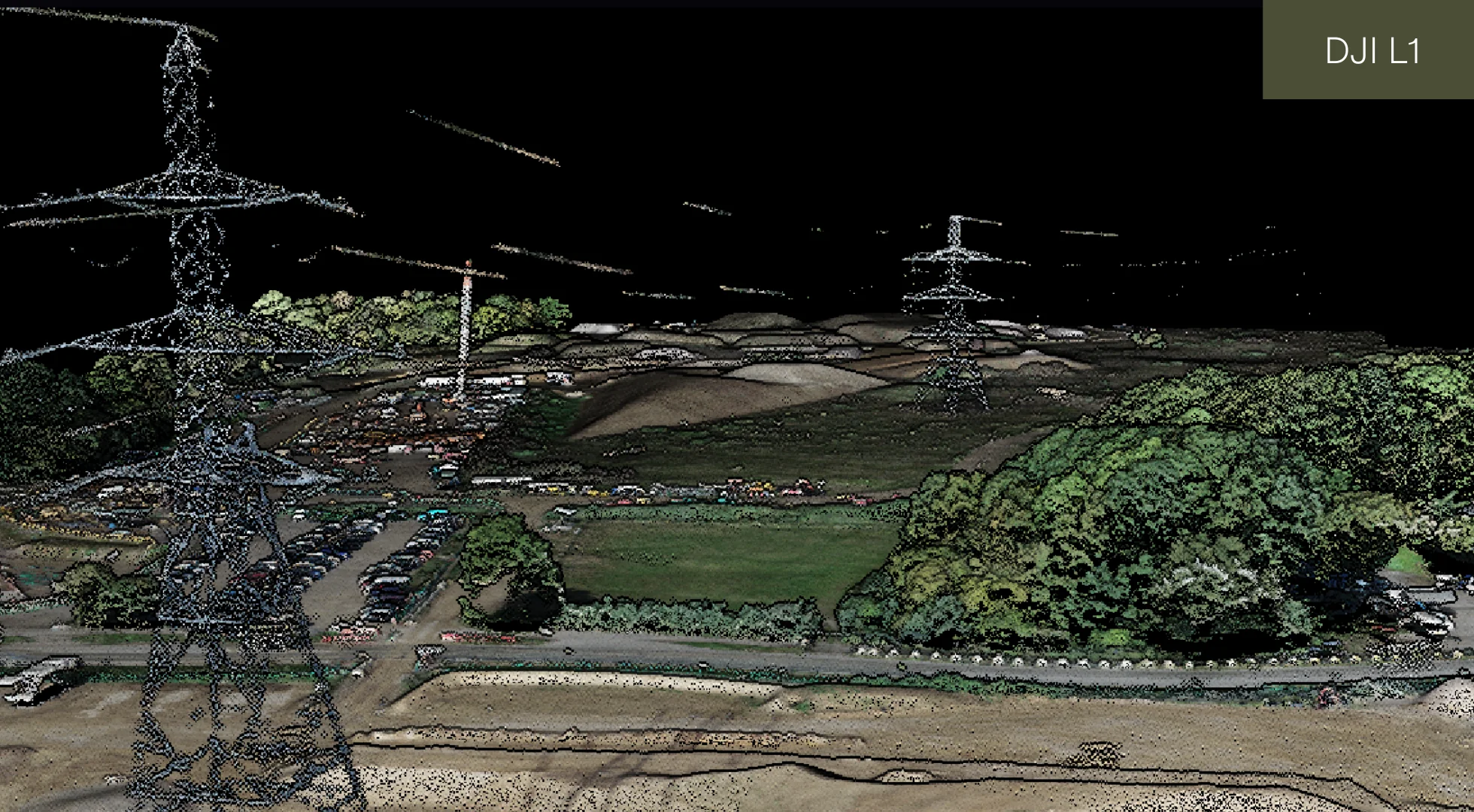
Il confine del sito è mostrato di seguito, tramite un ortomosaico 2D prodotto utilizzando la fotocamera RGB di L2.

Per i voli sono stati impostati i seguenti parametri:
| Parameter | L2 | L1 |
| Overlap | 50% | 50% |
| Velocità | 8m/s | 8m/s |
| Altezza | 100m | 100m |
| Return | Penta (5) | Triple (3) |
| Sampling Rate | 240khz | 160khz |
| Elevation Optimisation | Yes | Yes |
| Scanning Type | Repetitive | Repetitive |
| IMU Calibration | Yes | Yes |
| Mission Type | 2D Nadir | 2D Nadir |
| Flight Height | 100 metres | 100 metres |
| Photos | 334 | 325 |
| GSD | 2.69cm | 2.73cm |
| Mission Time | 24 min 27 sec Flight Time: 24 min 27 sec Pre-flight IMU warm-up: Not required | 32 min 50 sec Flight Time: 22 min 50 sec Pre-flight IMU warm-up: 10 minutes |
I parametri erano identici, fatta eccezione per l’utilizzo della maggiore velocità di ritorno e frequenza di campionamento di L2.
Vale la pena notare che la L2 può acquisire dati fino a 15 m/s, per una maggiore efficienza, ma in questo caso abbiamo mantenuto la velocità a 8 m/s. I parametri consigliati per L1 vanno da 8 m/s a 12 m/s, a seconda dello scenario di missione.
Le missioni sono state condotte ad un’altitudine di volo di 100 metri. Eravamo limitati a questa altezza a causa della vicinanza di un aeroporto locale.
L’L1 ha volato per 22 minuti e 50 secondi, mentre l’L2 è stato leggermente più lungo (24 minuti e 27 secondi), ma ciò è attribuito al fatto che la missione è stata effettuata con una velocità di ritorno Penta.
Nel complesso, la missione con l’L2 è stata più breve in quanto non ha richiesto il riscaldamento dell’IMU pre-volo.
Ispezione della linea elettrica
LiDAR è particolarmente efficace per l’ispezione delle linee elettriche: la rapida emissione di impulsi laser e la capacità di condurre più ritorni da un singolo impulso laser offrono una risoluzione spaziale più elevata.
Ciò aiuta a acquisire informazioni più dettagliate su strutture complesse come le linee elettriche, inclusa la loro forma e orientamento, e a identificare meglio i dettagli più fini.
L’immagine seguente mostra le linee elettriche di mappatura L2 sul sito HS2.

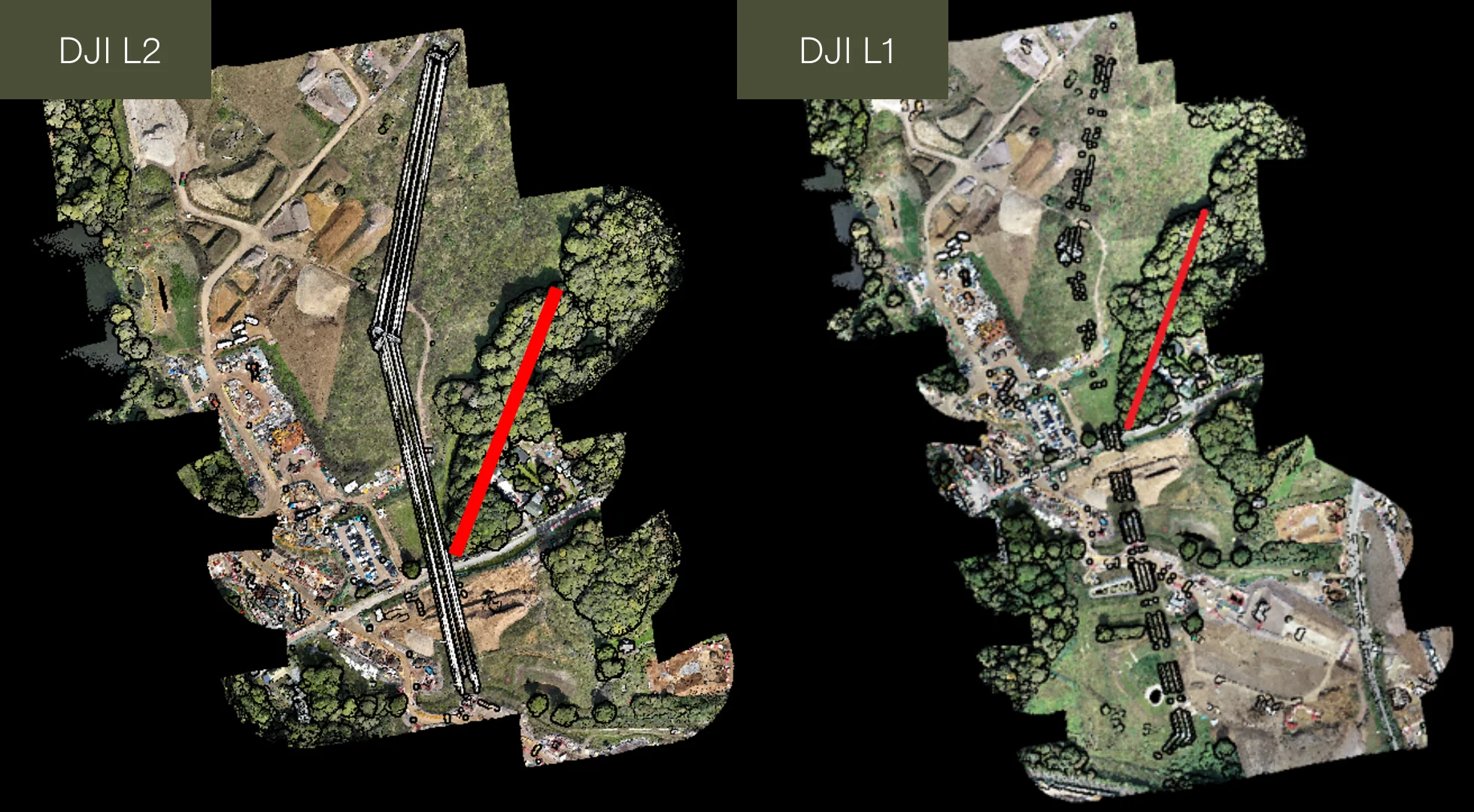
E quando si confrontano i risultati tra L2 e L1, è chiaro che L2 ha fatto un lavoro migliore nel rilevare i cavi e le torri di trasmissione sul posto, come mostrano queste due schermate, prese da DJI Terra.

Il maggiore livello di dettaglio nei dati L2 è evidente anche nella vista dall’alto verso il basso di seguito, utilizzando le immagini di Terrasolid. Si noti come le linee elettriche siano più complete nel set di dati L2, ma quasi inesistenti con L1.

Terrasolid è un software complementare a DJI Terra. I dati iniziali sono stati elaborati in DJI Terra e poi migrati su Terrasolid per ulteriori manipolazioni e analisi.
DTM
LiDAR è spesso considerato migliore per generare modelli digitali del terreno (DTM) rispetto alla fotogrammetria.
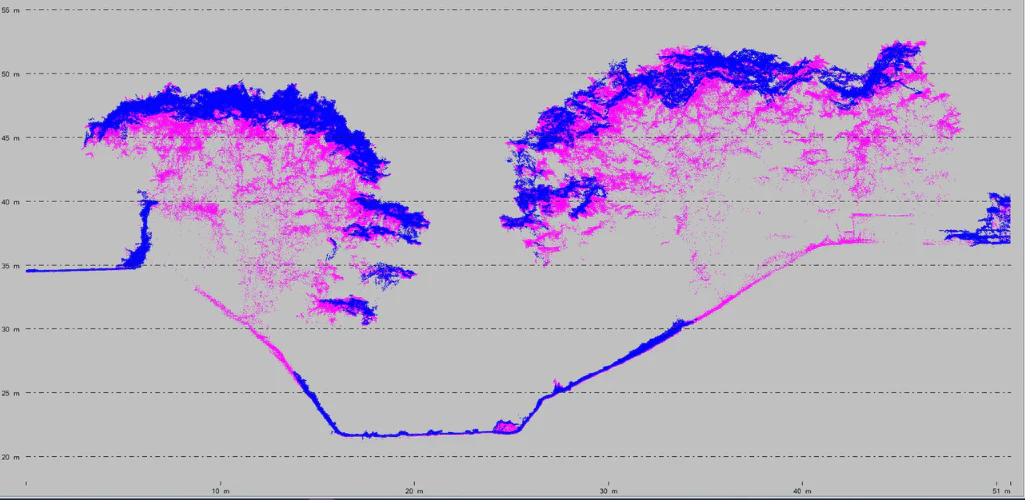
Una delle ragioni principali di ciò è che il LiDAR può penetrare nella fitta vegetazione e catturare la superficie del terreno, anche sotto spesse chiome. Al contrario, la fotogrammetria potrebbe avere difficoltà a catturare il terreno a causa dell’ostruzione della vegetazione.
Ciò è dimostrato in questo grafico che mostra le maggiori capacità del LiDAR (rosa) di penetrare nella chioma degli alberi rispetto alla fotogrammetria (blu).
I DTM rappresentano la base per la creazione di mappe topografiche dettagliate e accurate, che forniscono informazioni essenziali sull’elevazione e rappresentano accuratamente la superficie naturale della Terra in 2D.
Vantano una serie di casi d’uso, come la valutazione del rischio di inondazioni, la gestione delle risorse naturali, l’agricoltura di precisione, le valutazioni di impatto ambientale, la gestione delle catastrofi e la modellazione degli habitat naturali.
Quindi, come si comportano L2 e L1 quando si tratta di creare DTM?
Il grafico sottostante, tratto dal sito HS2, mostra che la L2 ha creato una superficie di terreno più robusta e completa, rispetto alla L1.
Ciò consente la creazione di un DTM di migliore qualità. Questo perché quando la nuvola di punti viene rasterizzata per creare il DTM ci sono meno lacune nei dati. Il DTM L2 è molto più completo con meno aree in cui non sono presenti dati registrati su cui basare la superficie.

Ciò è aiutato dalla maggiore frequenza di campionamento e dai livelli di rendimento di L2.
Vengono visualizzate le sezioni trasversali verticali sopra che mostrano i dati dell’impulso di ritorno.
Le immagini sottostanti mostrano la traiettoria di volo sopra l’area di vegetazione. Per inciso, si noti anche come le linee elettriche siano più complete nella visuale L2, rispetto alla L1.
Impressionato dal L2
Dopo aver visto i risultati, Pedro de Gouveia, capo pilota UAV presso Murphy Geospatial, ha elogiato le capacità dell’L2.
Ha detto: “Sono molto impressionato dalla qualità della nuvola di punti e dalla prospettiva di densità che deriva da L2 rispetto a L1.
“È sicuramente un grande passo avanti rispetto al sensore precedente, quindi ne siamo piuttosto entusiasti.
“Come abbiamo visto con i dati L2, il dettaglio extra nelle caratteristiche più fini come le linee elettriche e la penetrazione più robusta della vegetazione produce risultati di migliore qualità.
“Siamo molto interessati all’aumento della qualità dei dati rispetto alla L1 e alla maggiore efficienza d’uso: un esempio è che la L2 non necessita di un riscaldamento IMU prima dell’uso.”
Sito di prova due: Komatsu (Costruzione intelligente)
Abbiamo condotto un test di precisione nel nostro secondo sito, presso Komatsu UK (Smart Construction), dove heliguy™ ha tenuto la prima dimostrazione ufficiale del DJI Dock nel Regno Unito.
Lo scopo era valutare la precisione verticale di entrambi i sensori, rispetto ad alcuni controlli a terra.
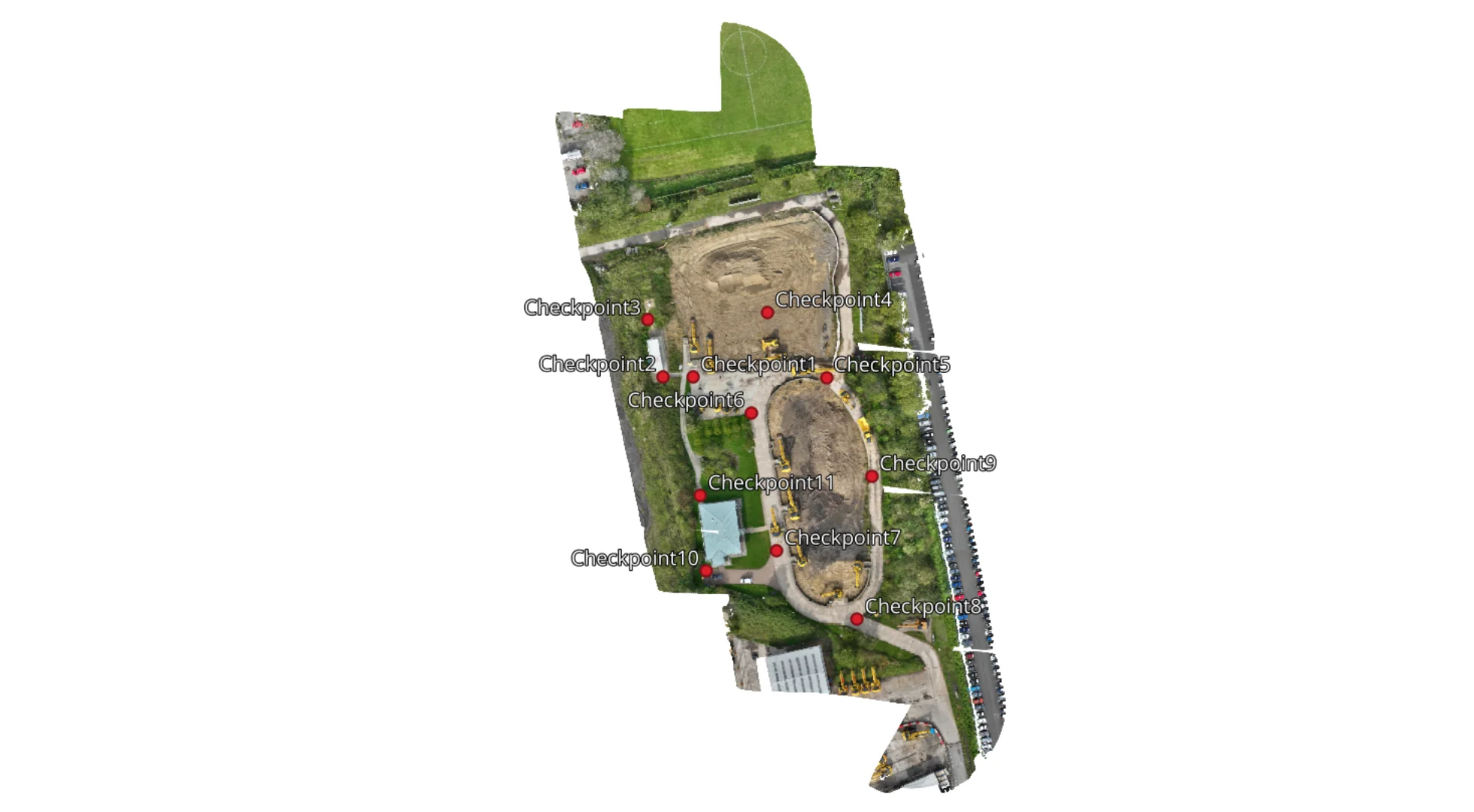
Il sito di rilevamento è raffigurato di seguito, utilizzando un ortomosaico 2D creato con i dati catturati dalla fotocamera RGB di L2.

Il volo è stato condotto ad un’altitudine di 50 metri utilizzando la rete RTK.
La precisione è stata confrontata con 11 punti di controllo, situati intorno al sito, come mostrato dall’immagine qui sotto.
I dati sono stati acquisiti con Emlid RX utilizzando il GNSS cinematico.
I checkpoint sono stati raccolti rispetto al sistema di coordinate orizzontali britannico OSGB36 British National Grid e al sistema di coordinate verticali Ordnance Datum Newlyn.
I dati LiDAR sono stati trasformati e confrontati con le elevazioni utilizzando il software DJI Terra. (ripetitivo)
I risultati della precisione sono mostrati nelle tabelle seguenti.
L2 – Tabella Precisione
| lD | X/E | Y/N | Z/U | Reconstruction Altitude | Altitude Difference | Reflectivity | DEM Residual |
| Checkpoint 1 | 426988.744 | 555507.879 | 29.574 | 29.510955 | -0.063045 | 44.176471 | -0.064533 |
| Checkpoint 2 | 426977.154 | 555507.738 | 32.386 | 32.332125 | -0.053875 | 68 | -0.053776 |
| Checkpoint 3 | 426971.714 | 555529.27 | 32.334 | 32.265565 | -0.068435 | 60.888889 | -0.064175 |
| Checkpoint 4 | 427016.95 | 555532.088 | 29.268 | 29.248312 | -0.019688 | 31.076923 | -0.01939 |
| Checkpoint 5 | 427039.261 | 555507.449 | 29.547 | 29.517893 | -0.029107 | 51 | -0.006884 |
| Checkpoint 6 | 427010.67 | 555494.035 | 29.465 | 29.437909 | -0.027091 | 52.428571 | -0.032742 |
| Checkpoint 7 | 427020.45 | 555441.956 | 29.419 | 29.390565 | -0.028435 | 47.05 | -0.03006 |
| Checkpoint 8 | 427050.895 | 555415.93 | 29.422 | 29.386423 | -0.035577 | 50.571429 | -0.042391 |
| Checkpoint 9 | 427056.486 | 555470.066 | 31.769 | 31.736009 | -0.032991 | 38.363636 | -0.052366 |
| Checkpoint 10 | 426993.7 | 555434.146 | 31.321 | 31.263169 | -0.057831 | 33 | -0.057875 |
| Checkpoint 11 | 426991.519 | 555462.74 | 31.103 | 31.032755 | -0.070245 | 42.333333 | -0.086014 |
L1 – Tabella Precisione
| ID | X/E | Y/N | Z/U | Reconstruction Altitude | Altitude Difference | Reflectivity | DEM Residual |
| Checkpoint 1 | 426988.744 | 555507.879 | 29.574 | 29.613559 | 0.039559 | 40.875 | 0.037683 |
| Checkpoint 2 | 426977.154 | 555507.738 | 32.386 | 32.433613 | 0.047613 | 57 | 0.044113 |
| Checkpoint 3 | 426971.714 | 555529.27 | 32.334 | 32.38752 | 0.05352 | 59 | 0.052116 |
| Checkpoint 4 | 427016.95 | 555532.088 | 29.268 | 29.33932 | 0.07132 | 29.477273 | 0.068321 |
| Checkpoint 5 | 427039.261 | 555507.449 | 29.547 | 29.594818 | 0.047818 | 35 | 0.060699 |
| Checkpoint 6 | 427010.67 | 555494.035 | 29.465 | 29.511275 | 0.046275 | 38.217391 | 0.040709 |
| Checkpoint 7 | 427020.45 | 555441.956 | 29.419 | 29.464285 | 0.045285 | 28.833333 | 0.041271 |
| Checkpoint 8 | 427050.895 | 555415.93 | 29.422 | 29.476193 | 0.054193 | 39.859155 | 0.053391 |
| Checkpoint 9 | 427056.486 | 555470.066 | 31.769 | 31.81791 | 0.04891 | 32.4 | 0.038929 |
| Checkpoint 10 | 426993.7 | 555434.146 | 31.321 | 31.367136 | 0.046136 | 16.823529 | 0.038454 |
| Checkpoint 11 | 426991.519 | 555462.74 | 31.103 | 31.032755 | 0.070319 | 20.615385 | 0.077148 |
Per ottenere il nostro errore verticale assoluto, abbiamo aggiunto i campi Differenza di altitudine e li abbiamo divisi per 11.
Utilizzando l’output di DJI Terra, questo ha fornito un errore verticale assoluto di 0,044 (44 mm) per L2 e 0,051 (51 mm) per L1.
Questo particolare sondaggio non ha utilizzato marcatori di controllo in bianco e nero che sarebbero visibili sui dati LiDAR. Per valutare la precisione planimetrica XY, i marcatori di segnale possono essere importati nel software Terrasolid per il confronto.
La precisione è stata il test principale presso il sito Komatsu. Ma vale anche la pena considerare la differenza tra le visualizzazioni della nuvola di punti RGB risultanti tra i due.
Ancora una volta, la L2 ha creato una nuvola di punti colorata più robusta.

Ad esempio, nel grafico L2:
- I passaggi sono più definiti;
- Il proiettore al centro dell’immagine è più robusto;
- È presente una colonna luminosa a sinistra dell’immagine. Questa colonna manca nel set di dati L1;
- Il muro è più completo e la texture viene aggiunta alla parte superiore del muro;
- Gli scavatori sono più completi e presentano dettagli extra.
Riepilogo
Rilasciato nel 2020, L1 è stato un sensore rivoluzionario: offre una soluzione LiDAR e fotogrammetrica plug and play a un prezzo accessibile.
Ora, L2 è qui e offre alcuni progressi significativi che miglioreranno la precisione, l’efficienza e la generazione di nuvole di punti del rilievo.